
AIDIMME desarrolla un sistema de aprendizaje de cobot mediante técnicas aprendizaje por refuerzo y aprendizaje por demostración
• El proyecto desarrolla un sistema de aprendizaje de forma que el robot colaborativo sea capaz de generar programas de forma automática, sin ser necesaria la intervención humana.
• En el proyecto se están utilizando dos técnicas de aprendizaje, el aprendizaje por refuerzo y el aprendizaje por demostración.
El Instituto Tecnológico AIDIMME desarrolla un proyecto para “enseñar” a lijar piezas a los robots colaborativos (cobots) partiendo de la experiencia humana en la realización de este tipo de tarea.
El proceso de lijado viene condicionado por diferentes variables como por ejemplo: el tipo de material a lijar, el tipo de lija, el grano de la lija, la presión ejercida sobre la pieza a la hora de lijar, la velocidad de giro de la lija, el tipo de equipo de lijado empleado, la velocidad de avance del equipo lijado, el recorrido que realiza la lija a lo largo de la pieza, etc.
Muchas de las variables indicadas son externas al proceso en sí del lijado, como por ejemplo el material de lijado, el tipo de lija, el grano de lijado, el tipo de equipo de lijado empleado, con lo que son variables que debemos definir previamente a la realización del proceso de lijado.
De forma habitual suelen existir 2 tipos de recorridos, lijado en zig-zag y lijado en espiral, generalmente el recorrido que se realiza viene determinado por los gustos de la persona que está ejecutando, siendo los dos métodos válidos.
En el caso del sistema de aprendizaje por refuerzo, partiendo de esas condiciones previas, las variables sobre las que se puede ir actuando para conseguir un resultado correcto del proceso de lijado son la presión ejercida sobre la pieza a la hora de lijar, la velocidad de giro de la lija y la velocidad de avance del equipo lijado. El equipo de lijado MIRKA con el que se realizan las pruebas permite una regulación de la velocidad, pero se ha decidido centrarse inicialmente en dos variables, la presión y la velocidad de avance, dejando la variable velocidad para incorporarla en un futuro en función de los resultados que se obtengan.
El algoritmo de aprendizaje implementado permite que el robot colaborativo pueda ir variando, dentro de un rango, tanto la presión como la velocidad de desplazamiento a la hora de realizar el lijado de una pieza, tras finalizar el proceso de lijado un operario experto en lijado evalúa le resultado obtenido con los parámetros utilizados. A partir de los datos que se le van introduciendo al sistema sobre el resultado del proceso de diseño el algoritmo va aprendiendo cuales son los valores más adecuados para cada una de las variables, en función del entrenamiento que se le proporcione al sistema esté irá mejorando los resultados obtenidos hasta conseguir un nivel de calidad de lijado muy alto.
Como alternativa a que un experto fuera el responsable de evaluar el resultado del proceso, se estudió la posible utilización de sensores que nos permitieran medir la calidad del lijado, pero las diferentes soluciones evaluadas no eran viables, una de las alternativas estudiadas fueron los sistemas de visión, pero se comprobó que no tenían la capacidad suficiente para detectar los defectos pequeños, con lo que se decidió que el sistema más efectivo para evaluar el resultado era la utilización de un experto.

Como alternativa a que un experto fuera el responsable de evaluar el resultado del proceso, se estudió la posible utilización de sensores que nos permitieran medir la calidad del lijado, pero las diferentes soluciones evaluadas no eran viables. Una de las alternativas estudiadas fueron los sistemas de visión, pero se comprobó que no tenían la capacidad suficiente para detectar los defectos pequeños, con lo que se decidió que el sistema más efectivo para evaluar el resultado era la utilización de un experto.
En el caso del aprendizaje por demostración, se parte del desarrollo un sistema que sea capaz de aprender a partir de la observación de la ejecución de la tarea, en nuestro caso el reto era como trasladar esa “observación” a un robot colaborativo.
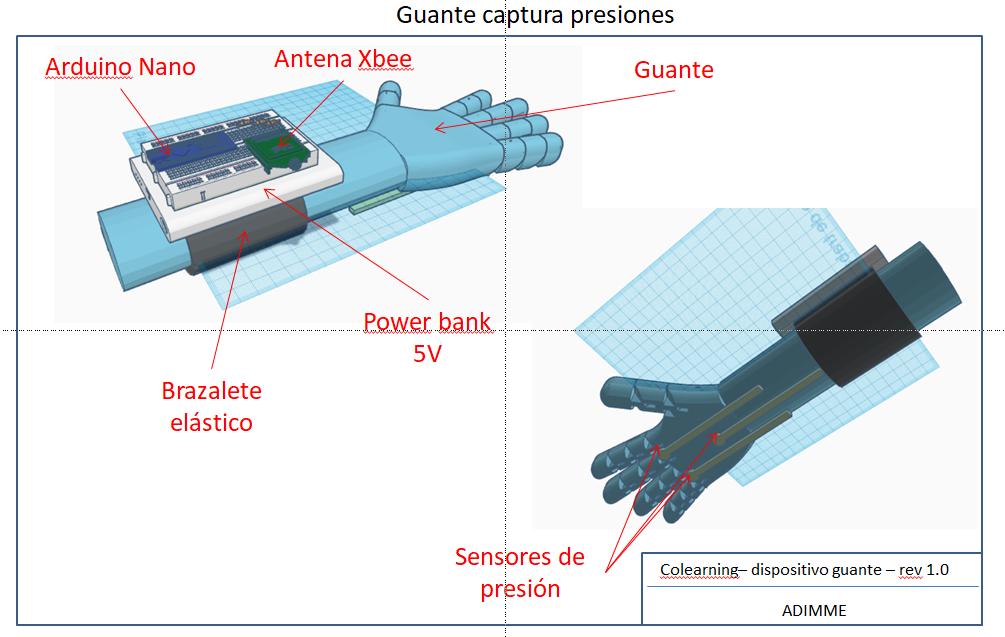
Para poder recoger esa información, se han utilizados dos sistemas, por una parte se han desarrollado un guante sensorizado que nos permite recoger la información del proceso de lijado llevado a cabo por un operario experto, el guante permite evaluar la presión ejercida sobre la pieza y por otra parte mediante una cámara de visión 3D se captura el recorrido que el operario hace a lo largo de la pieza durante el proceso de lijado, y con ello la velocidad de movimiento del equipo de lijado. La información obtenida a partir de diferentes iteraciones del proceso, nos permite entrenar el algoritmo de aprendizaje de forma que el robot colaborativo ante la necesidad de lijar una nueva pieza sea capaz de determinar cuales son las presiones y recorridos que se debe aplicar para que el resultado sea el óptimo
Con estos dos sistemas se pretende desarrollar una nueva forma de interacción con los sistemas robóticos abriendo alternativas que vayan más allá de la programación predefinida como paso imprescindible para que un robot pueda ejecutar una tarea.
El proyecto de investigación y desarrollo “Desarrollo de técnicas de aprendizaje para cobots basadas en interacción humana y aprendizaje de refuerzo”, COLEARNING 4.0, está financiado por el Instituto Valenciano de Competitividad Empresarial, IVACE, y el Fondo Europeo de Desarrollo Regional, FEDER, hasta junio de 2021.


Número de proyecto: 22000052
Expediente: IMDEEA/2020/22
Duración: Del 01/04/2020 al 30/06/2021
Coordinado en AIDIMME por: SÁNCHEZ ASINS,JOSÉ LUIS
Línea de I+D: INDUSTRIA 4.0
Para más información contacte con AIDIMME.
Visitas: 1195