
AIDIMME ha validado con éxito un sistema de captura de datos para el aprendizaje de robots, mediante demostración humana en el proceso de lijado
El Instituto Tecnológico AIDIMME desarrolla el proyecto COLEARNING para “enseñar” a lijar piezas a los robots colaborativos (cobots) partiendo de la experiencia humana en la realización de este tipo de tarea.
Uno de los métodos de enseñanza desarrollado es el basado en la demostración humana. Es decir, el robot “aprende” de un operario experto en base a las trayectorias seguidas y la presión ejercida sobre la lijadora, durante el proceso de lijado de una determinada pieza.
Para lograr dicho objetivo se ha desarrollado un sistema capaz de capturar la presión ejercida por parte del operario sobre la lijadora, así como otro sistema capaz de capturar la trayectoria seguida por la lijadora sobre la pieza.
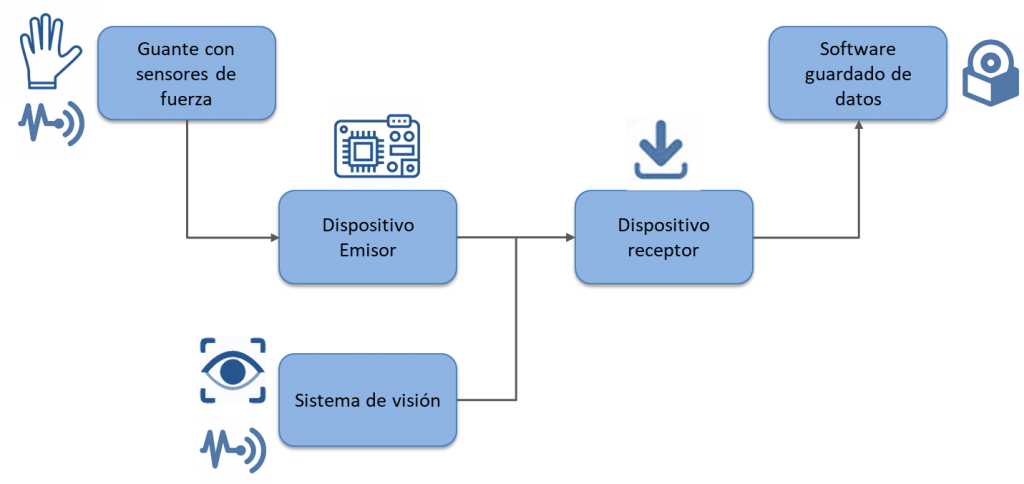
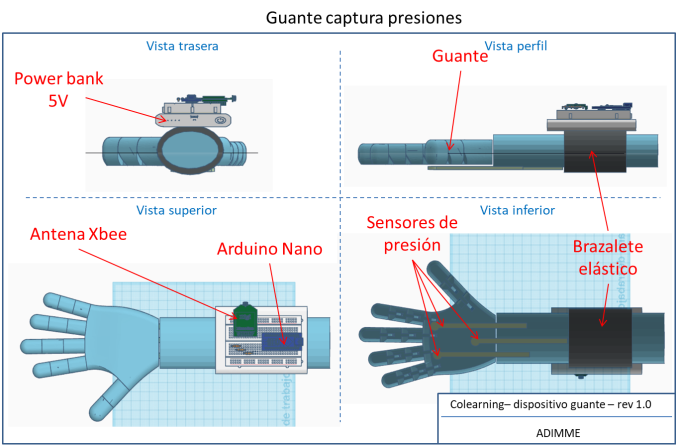
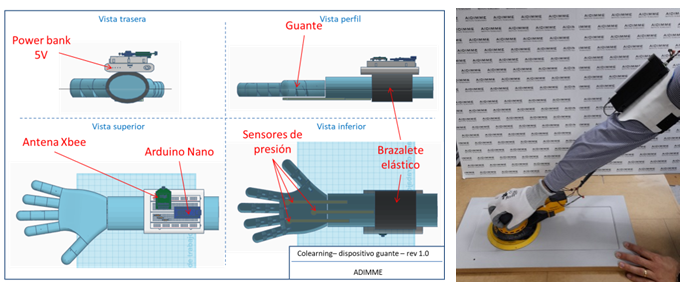
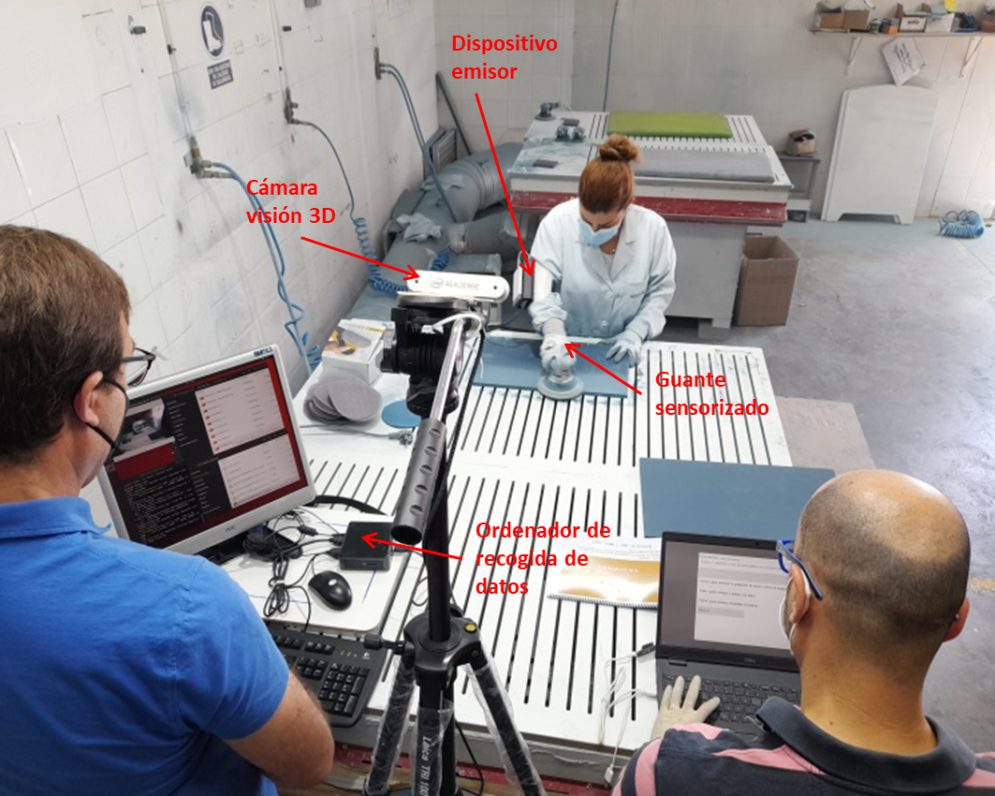
El sistema, desarrollo propio en AIDIMME, consta de un guante con sensores de presión y una cámara de visión 3D programada para reconocer las trayectorias que sigue la mano del operario durante el proceso de lijado.
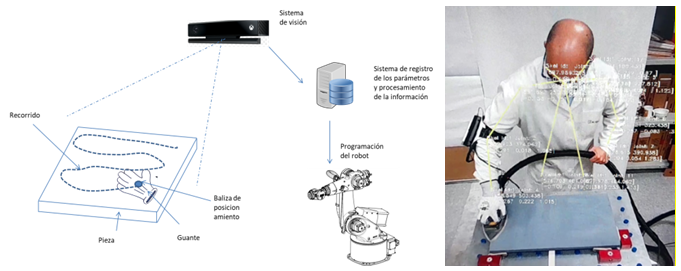
En una primera fase, el sistema se ha validado a nivel laboratorio, mediante el lijado de diferentes piezas planas. Esta fase inicial ha permitido verificar la sincronía de los datos del guante sensorizado y el sistema de visión 3D, así como establecer las bases para definir la estrategia de validación en un entorno real productivo.
Para esta segunda fase de validación, se ha contado con la colaboración de la empresa MICUNA, dedicada a la fabricación de mobiliario infantil y puericultura. Una de las trabajadoras experta en lijado, ha llevado a cabo el proceso para 40 piezas iguales de 500 x 300mm, utilizando el guante sensorizado, mientras el sistema de visión 3D capturaba los movimientos de la lijadora sobre la pieza.
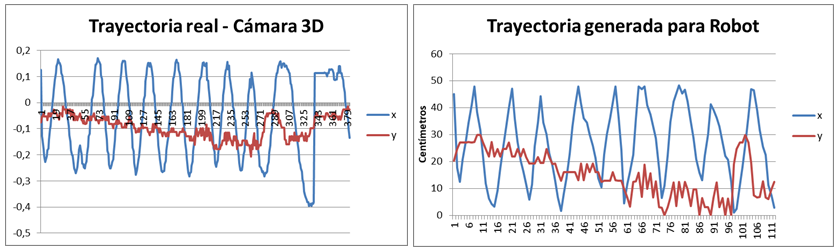
Todos los datos capturados han sido analizados realizando un filtrado y transformación de los mismos, para obtener una función de trayectorias y presiones que pueda ser transferida e interpretada por un robot para ejecutar el proceso de lijado, imitando la operación del trabajador. A continuación, se muestra una gráfica de la trayectoria real en un plano XY (donde se ubicaría la pieza a lijar) generada por la operaria y capturada por el sistema de visión, y la finalmente generada tras el filtrado y transformación matemática llevada a cabo para transmitirla al robot.
El sistema desarrollado permitirá generar programas de lijado para robot de forma rápida y sencilla, partiendo de la captura de datos de un operario experto que lija una sola pieza. A partir de ahí, el robot será capaz de replicar la trayectoria y presión ejercida en todas las piezas con igual geometría.
El proyecto de investigación y desarrollo “Desarrollo de técnicas de aprendizaje para cobots basadas en interacción humana y aprendizaje de refuerzo”, COLEARNING 4.0, está financiado por el Instituto Valenciano de Competitividad Empresarial, IVACE, y el Fondo Europeo de Desarrollo Regional, FEDER, hasta julio de 2021.
Juan Del Agua Navarro
TECNOLOGÍAS Y PROCESOS • TIC & Desarrollo Industrial

Número de proyecto: 22000052
Expediente: IMDEEA/2020/22
Duración: Del 01/04/2020 al 31/07/2021
Coordinado en AIDIMME por: SÁNCHEZ ASINS, JOSÉ LUIS
Línea de I+D: INDUSTRIA 4.0
Proyecto que cuenta con el apoyo de:

Para más información contacte con AIDIMME.