

Finaliza el proyecto Visionar
El objetivo del proyecto se orienta hacia la obtención de procesos autónomos que sean capaces de gestionar el flujo de fabricación con mínimas intervenciones externas, basándose en el uso de robots y en sistemas de visión artificial que permitan adecuar las trayectorias del robot de forma automática, y en tiempo real, en función de la geometría y disposición de los productos sobre los que tiene que intervenir.
Durante esta anualidad se ha evaluado la problemática asociada a la reconfiguración de trayectorias de un robot colaborativo UR16e, a partir de la identificación de objetivos mediante diferentes sistemas de visión artificial, con objeto de realizar una recogida automática (picking) de tales objetos dispuestos de forma aleatoria.

En la realización de las pruebas se han detectado varios puntos que generan conflictos a nivel operativo, y que deben ser resueltos en cualquier aplicación de este tipo que se quiera desarrollar. Los problemas más relevantes hacen referencia a los siguientes aspectos:
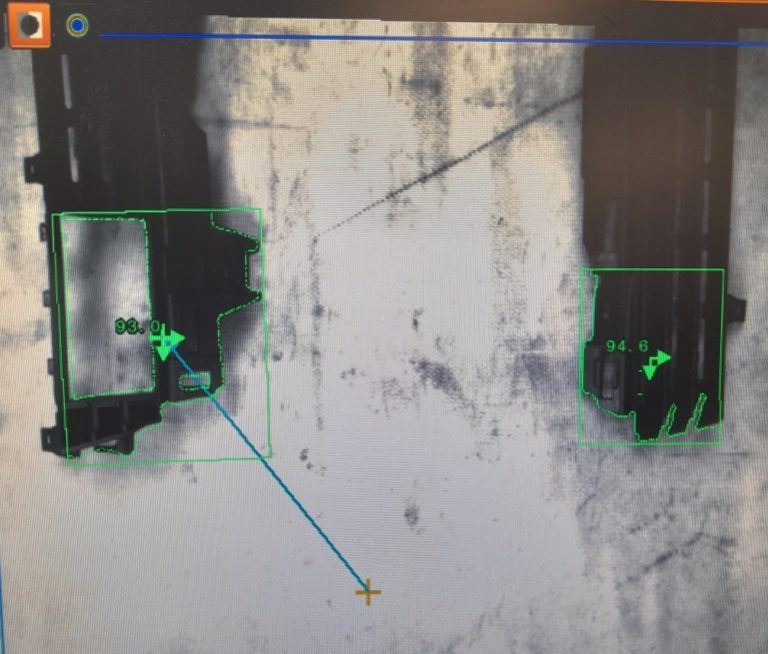
▪ Sistema de visión. Dado que se está probando un sistema portable, no es viable ubicar la cámara en una posición fija, sino que debe acoplarse al brazo robot. Esto supone que la distorsión de la imagen dependerá de la posición del brazo respecto a la pieza y de la ubicación de la cámara en el brazo. En las pruebas realizadas se observan variaciones en el posicionamiento del punto de recogida debido a la geometría de la pieza, color de la pieza y del fondo y también por la distorsión de la lente. Igualmente se debe resolver la problemática asociada al tamaño de la pieza cuando excede el campo de visión proporcionado por el objetivo de la cámara, ya que entonces no se puede “ver” la pieza completa y es posible que el punto de recogida quede fuera de campo. Todo esto supone que el procedimiento de calibración e identificación de formas debe realizarse de forma sistemática en cada pieza.
▪ Sistema de agarre de las piezas. Para cada pieza debe diseñarse un sistema de agarre específico, ya que difícilmente las geometrías van a permitir utilizar el mismo sistema de sujeción, salvo que sean piezas muy similares.
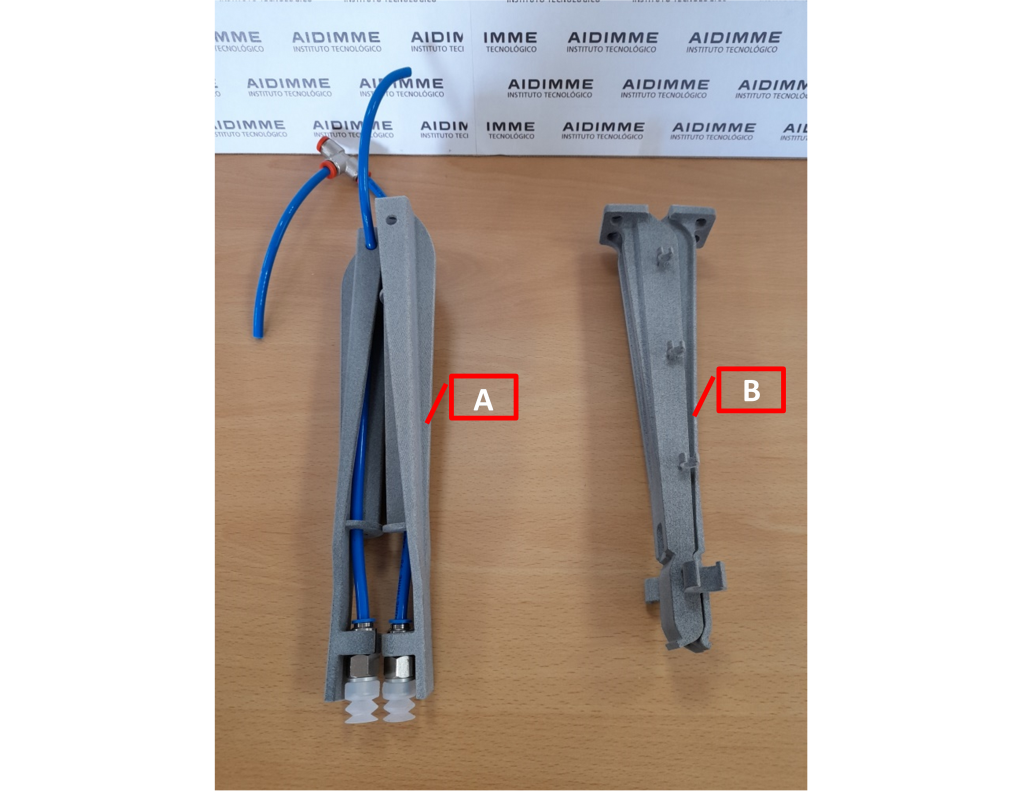
Los sistemas de sujeción han sido diseñados y fabricados en AIDIMME, utilizando componentes elaborados con tecnología de fabricación aditiva.
Como resultado del proyecto se ha desarrollado una aplicación piloto cuya funcionalidad permite recoger piezas sin posicionamiento fijo (ubicación cuasi-aleatoria) de una cinta transportadora, y posicionarlas en pequeños contenedores siguiendo un lay out especificado.

Este proyecto está financiado por el IVACE, con fondos GVA 2021.


Número de proyecto: 22100005
Expediente: IMAMCC/2021/1
Duración: Del 01/01/2021 al 31/12/2021
Coordinado en AIDIMME por: SÁNCHEZ ASINS,JOSÉ LUIS
Línea de I+D: INDUSTRIA 4.0
Evalúe nuestro proyecto:

Para más información contacte con AIDIMME.
Visitas: 436